










Education and Research
Hardware Buyers Guide
Are you an Educator or Researcher who needs help deciding which kit or manipulator to purchase? We put together a handy buying guide to answer many frequently ask questions and to guide you through which kits are best for your project goals.

How to Choose the Right Trossen AI Kit for Your Research
Every Trossen AI platform ships with the same core arm technology, software stack, and support commitment — but each kit is optimized for a different research environment and workflow. The decision starts with two questions: Do you need bimanual manipulation? And does your research happen in a fixed lab or in the field?
If your tasks require two-arm coordination in a fixed, controlled lab environment, the Stationary AI is engineered for that setup. If you need the same bimanual capability but across multiple locations or in dynamic environments, the Mobile AI adds a wheeled platform without sacrificing arm performance. If your work is single-arm — teleoperation, dataset recording, or model inference in the field — the Solo AI is the most portable and cost-efficient path to get started. For labs building custom configurations or expanding an existing setup with individual arms, the WidowX AI is available as a standalone unit in leader or follower configurations. All four platforms are Aloha V2-compatible, share the same iNerve control architecture, and integrate natively with the Trossen Data Collection SDK.
Have More Questions?
We're here to help. Fill out the form and let's chat about your project goals.

TROSSEN AI MISSION
At the core of our Trossen AI hardware line is the ethos of the ALOHA Project—A LOw-cost HArdware—bringing advanced robotics to researchers, students, and engineers at an unparalleled price, making cutting-edge Machine Learning research more accessible than ever.
Keep scrolling to see all the new features we've added ↓









Trossen Data Collection Lab.
Machine Learning Kits.
GUI Touchscreen.
iNerve® Controller.
Driver.
Model Evaluation.
Hugging Face LeRobot.
Data Collection.
Models
-
Transformers
-
Diffusion
-
Etc
Data
-
Parquet
-
HDF5
-
Etc
Moel Training On-Device or in the cloud.
Google CoLab.

DATA COLLECTION THAT JUST WORKS
NO HASSLE SETUP IN 3 SIMPLE STEPS



BECAUSE IT'S MORE THAN JUST HARDWARE
Hardware
Hardware that’s built from the motor up to deliver high performance and longevity.
Next-Gen QDD Servos
A Hybrid-drive design optimized for precision and control.
Robotic Manipulators
Tailor-made for robotic machine learning research.
Workstation Kits
Desktop, tabletop, or mobile; there is a solution for your project needs.
Controllers
Multiphase PID control system allows for the most advanced accuracy, repeatability, and performance.
Lightning-Fast Asynchronous Data Protocol
At over 10,000Hz, it offers a virtually zero-latency operating environment.
Ultra-High Performance iNerve® Controller
Offloads critical computational tasks from your computer, like gravitational compensation, delivering unprecedented responsiveness.
C++ Interbotix UDP Driver
Easily PIP installable with simple Python and ROS bindings for easy and rapid development and integration.
Data Pipelines
Powerful open-source tools and workflows for rapid and collaborative research and development.
Data Collection
Easy-to-use GUI interfaces, cross-compatible data formats, and Hugging Face LeRobot support make data collection a breeze.
Model Training
Simple on-device or cloud-based model training.
Model Evaluation
Fine-tune your models for advanced control and take advantage of pre-trained models for testing.

ITS AN ENTIRE AI PLATFORM


HARDWARE
ONE OF THE MOST COMMON HARDWARE LAYOUTS IN DATASETS

Compatible with a large number of core-model data sets
Aloha | BiACT | OCTO | π0 | Aloha Unleashed | Crossformers | and more!
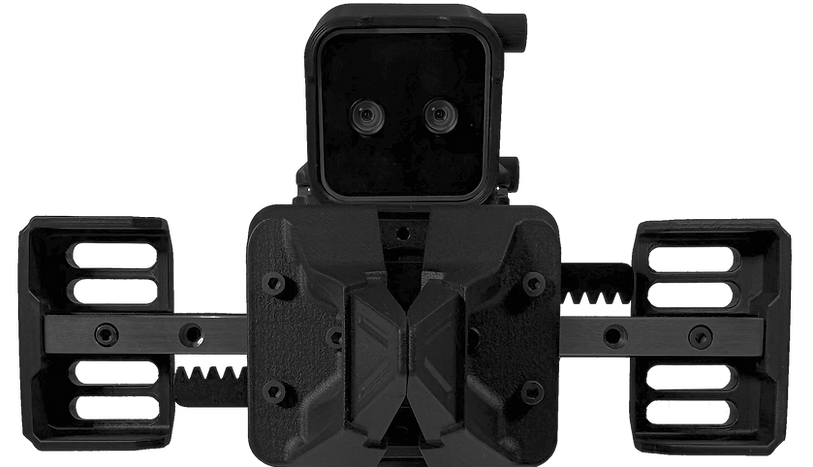
RUGGED AND BUILT TO LAST
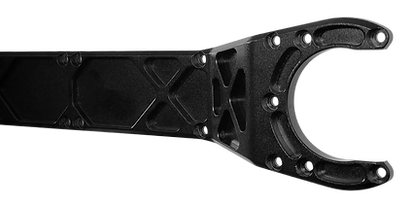

BILLET CNC ALUMINUM
From brackets to idlers, it's built for 10,000s of use cycles

INTEGRATED CABLE MANAGEMENT
With durable reinforced braided data and power cables

NEXT-GENERATION QDD SERVOS
Built for high-torque in a compact lightweight housing

RACK & PINION GEARSET
Providing a linear control in a compact design

JOINT STATE FEEDBACK
Sense interaction forces with built-in servo response

CONTROLLERS
INTERBOTIX DRIVER
OPERATING MODES
-
Position
-
Velocity
-
Torque
-
Gravity Compensation
COMM PROTOCOL
-
UDP over Ethernet
-
Asynchronous
PLATFORMS
-
Linux C++ with Python bindings
-
Easy Python pip installation
-
ROS 2 support
-
URDF/Models for simulators*
-
Native support for Hugging Face LeRobot
500Hz
CONTROL FREQUENCY
ETHERNET
CONNECTIVITY
PIP
EASY INTALLATION

*Support for simulation software will arrive in Q2 2025
iNerve Control Board

CAN FD
HIGH-SPEED PROTOCOL
INDUSTRIAL
HARDWARE GRAV COMP
CUSTOM
PAYLOAD PROFILES
MODEL-BASED CONTROL
Experience unmatched precision and control with advanced compensation for gravity, Coriolis forces, centrifugal forces, and friction—seamlessly calibrated and modeled through servo feedforward torque optimization and eliminating nonlinear components of manipulator dynamics.
HIGH-SPEED CAN FD CONTROL PROTOCOL
CAN FD delivers over 500Hz data transfers, reduced latency, and enhanced real-time performance, enabling seamless communication and superior precision.
CUSTOMIZABLE NETWORK CONFIGURATIONS
Tailor for your network needs—customize IP/DHCP settings, DNS, netmask, and gateway directly on the iNerve Control Board for seamless integration into any network.
CUSTOM LOAD MASS PROFILES
Tailored Precision for Every Payload: The iNerve Control Board empowers researchers to define custom load mass profiles, seamlessly adapting to unique end-effectors and mass-altering additions. Achieve unparalleled gravity compensation for diverse research objectives and project needs.

SERVO CONTROL

PID
CONTROL SCHEMA
QDD
TORQUE SENSING
ADVANCED
SAFETY FEATURES
CASCADING PID CONTROL LOOP
Servo performance is optimized by separately tuning position, velocity, and torque control, ensuring precise movements and minimized overshoot. Advanced error correction increases stability in complex tasks.
ADAPTIVE BANDWITH CONTROL & LOAD BALANCING
Tailored for real-world precision by dynamically optimizing control loops: 1kHz for precise positioning, 4kHz for smooth velocity adjustments, and a blazing 16kHz for torque feedback, ensuring stability and responsiveness during high-demand tasks like dynamic motion and delicate manipulations. Featuring a high-bandwidth linear controller for resource-constrained motors and low-bandwidth model-based feedforward terms for advanced arm control, it delivers unparalleled performance across a range of applications. Additionally, proportional, derivative, and integral gains are fully configurable for each loop, giving researchers and engineers precise control to fine-tune performance for any task.
ADVANCED SAFETY FEATURES
At the forefront of robotic safety, our system is designed with robust features that prioritize user and device protection during operation. From preventing unintended movements to providing enhanced collision awareness, every element is engineered to ensure seamless and safe functionality, whether conducting research or deploying in high-stakes environments. With real-time monitoring, automatic fail-safes, and compatibility checks, our safety protocols instill confidence in every user interaction.
Current Safety Features
-
Joint Constraint Enforcement: Limits on position, velocity, and torque are applied to prevent exceeding safe operational thresholds, regardless of the mode in use.
-
Idle Mode: Implements gravity compensation and significant damping while retaining constrained gripping force, ensuring controlled and secure resting states.
-
Motor Failure Protection: Automatically transitions to idle mode upon motor failure detection, preventing unsafe operations.
-
External Torque Estimation: Enables applications like haptic feedback and collision detection, providing enhanced operational awareness.
-
Handshake Verification: Confirms the integrity of communication between the driver and arm to ensure the correct device is being controlled.
-
Firmware Compatibility Validation: Verifies driver and controller firmware versions align before operation, preventing compatibility issues.
-
System Health Monitoring: Performs checks on all arm components to ensure functionality before allowing user control.
Upcoming Safety Features (Q2 2025)
-
Enhanced Collision Detection: Automatically transitions to idle mode upon detecting collisions, ensuring immediate safety.
-
Communication Quality Monitoring: Activates idle mode in the event of a lossy or unstable connection, maintaining operational integrity.
-
Pre-trajectory Collision Avoidance: Conducts self-collision checks before executing trajectories, safeguarding the system during complex movements.
With these advanced safety features, our system sets a new standard for robotic manipulators, ensuring precision, reliability, and confidence in every application.
MuJoCo



DATA PIPELINES

TOUCHSCREEN GUI
Simple YAML file configuration and your effortlessly collecting data. All bundled kits come with a touchscreen.

DATA FORMATS
Built-in support for common data formats: Parquet, Arrow, and HDF5. Easily utilize your own data format for even more flexibility.
HUGGING FACE LEROBOT
Native support for Hugging Face LeRobot. Data collection pipeline,
data and model storage, and social sharing... All for FREE!

INTERBOTIX PIPELINE
Interbotix combines high-performance C++ with simple Python bindings, offering low-level control and integration with ROS's powerful tools and ecosystem.

ON-DEVICE MODEL TRAINING
Utilize NVIDIA or Intel-based GPUs to train your models.

COLAB CLOUD MODEL TRAINING
With our free Jupyter Notebook template, you can quickly and affordably offload model training to the cloud using Google Colab.


MODEL EVALUATION
Use your own trained models, or shared pre-trained models
to evaluate your model perameters and training settings
HYPERPARAMETERS
Tweak hyperparameters for better results with a single YAML file containing all the settings like the Temporal Ensemble Coefficient, Feed Forward Dimensions, Layers, Heads, ResNet, and many more.
RESOURCES
From startup guides to expert support, explore the tools, documentation,
and protection that come standard with every Trossen Robotics product.
THE TROSSEN PROMISE
We stand behind our products with an industry-leading commitment to reliability, service,
and long-term support—because we believe performance should be measured in years, not months.
BUILT FOR REAL-WORLD RESEARCH ENVIRONMENTS. COVERS DEFECTS IN MATERIALS AND WORKMANSHIP. WEAR COMPONENTS ARE FIELD-REPLACEABLE AND READILY AVAILABLE.
LIFETIME SUPPORT FOR TROSSEN PRODUCTS
COMPARE AI KITS

Solo AI is designed for data collection in the field and for those NOT needing bimanual manipulation.
FAQs
2x Solo AIs CANNOT be converted into a Stationary AI, as we do not sell the frame, cables, and accessories individually.

Stationary AI is designed for those who require bimanual manipulation and a well-controlled lab environment where variables like arm and camera placement are consistent from session to session.
FAQs
Stationary AI can be used as two Solo AIs for data collection in the field.
Stationary AI does NOT come with the table due to the high shipping cost. We recommend a desk with a minimum width of 48" and a minimum depth of 30". The choice of table, including its color, texture, and stability, can have an impact depending on your final use case. Many of our customers aim to implement or fine-tune models like Pi0, Groot, SmolVLA, or Gemini. These models were typically trained on datasets that used a maple-colored tabletop, which is why we recommend the Uline Industrial Packing Table with a maple top.
Here are some key reasons for this recommendation:
-
Visual consistency: Using a similar table helps reduce the domain gap when fine-tuning models trained on standard datasets.
-
Textured surface: The subtle features on the maple surface improve spatial understanding for the model.
-
Color contrast: Light wood tones contrast well with most everyday objects, improving object detection and segmentation.
-
Non-reflective finish: The matte texture minimizes glare and light reflections, leading to cleaner image data.
-
Stability: The table is sturdy, reducing vibrations during demonstrations or evaluation.
Any table with a similar size (approximately 48 inches by 30 inches) and a matte, light wood finish such as maple should work fine. We've observed that using bright or medium-toned wooden surfaces (like maple) helps reduce uncertainty during training by providing good visual contrast and stable surface features. However, other colors, such as black or white, can also be used—as long as you’re aware that you may need to collect more demonstrations and perform additional tuning to achieve comparable results.
If you plan to train models from scratch or operate in a different visual domain, the table color becomes less critical. In that case, collecting more diverse demonstrations can help account for variations in the environment.

Mobile AI is designed for those who require bimanual manipulation in the field, where variables like arm and camera placement are consistent from session to session.
FAQs
Mobile AI can be used as two Solo AIs for data collection in the field.
GET A QUOTE

Trossen AI Hardware and Kits
Are you interested in obtaining a quote? Fill out the form, and we will contact you soon.
Ship Address*
Bill Address*
If this is for a different product, other than the AI hardware, please go to the specific product page you are interested in and fill out that form.
Never share sensitive information (credit card numbers, social security numbers, passwords) through this form.